黑豆的博客
视频
(opens new window)
前端
前端
Vue
深入浅出Vue
Vue
VueRouter
Vuex
Vue3核心剖析
Vue知识点简单梳理
React
深入React技术栈
React进阶实践指南
React知识点简单梳理
混合开发
混合开发探究
TypeScript
极简入门Typescript
Webpack
极简入门
常见面试题
设计模式
JS设计模式核心原理和应用实践
基础必备
HTML必备
CSS必备
JS基础
JS进阶
JS练习
网络基础
JS高级程序设计
浏览器相关基础
后端
后端
Java
Java基础
Java进阶
JavaWeb
Java框架
算法
算法
入门级算法
常见算法
常见数据结构
前端算法与数据结构
电子
电子
STM32
STM32四轴飞行器
Arduino
Arduino墙画机
Arduino四轴飞行器
Arduino四足仿生机器人
关于
(opens new window)
必读!!!
出厂前飞控板都已下载过程序,如果只是简单飞行,此步可忽略,无需再下载程序。
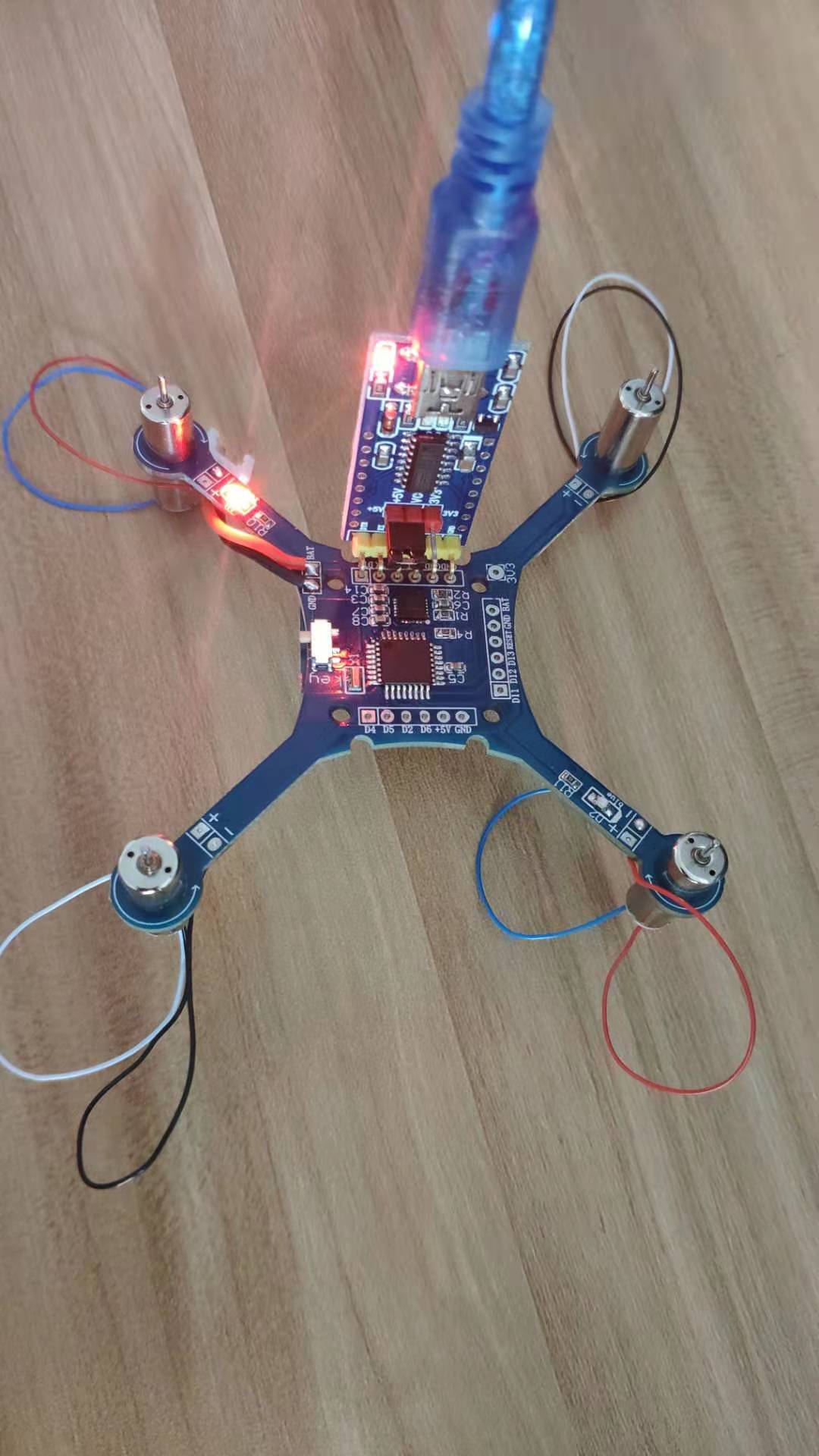
程序的下载(为防止数据冲突请下载调试时关闭蓝牙开关,将蓝牙开关拨到右边)
如图将下载线插入飞控板,注意下载板的位置和方向,插反、插错都会烧坏板子
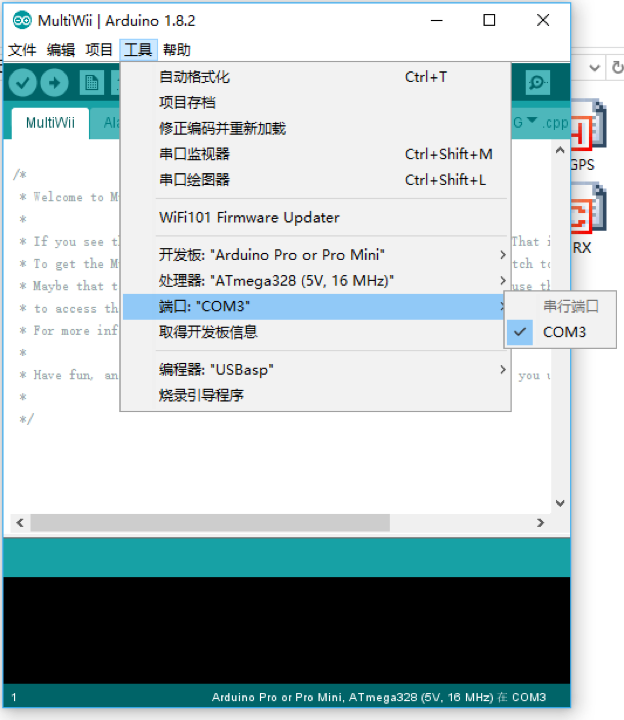
把下载器连接到下载口,PC端查看对应COM口,打开源程序,开发板选择Arduino Pro or Pro Mini,处理器选择ATmega328(5V,16Mhz),端口选择对应的COM口;
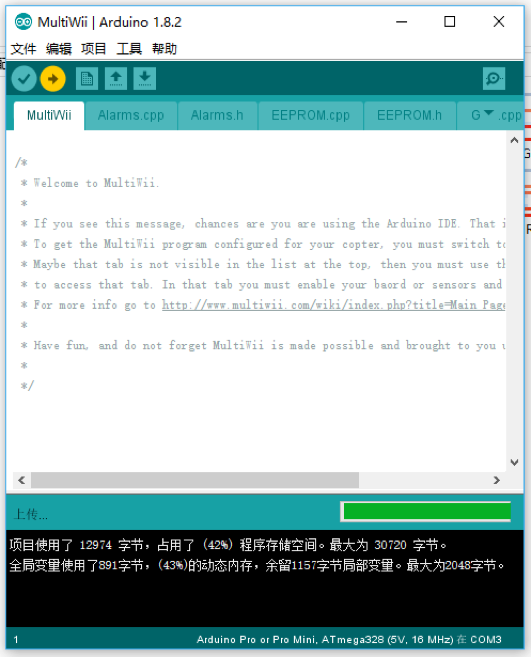
点击上传,等待编译上传完成!
←
第七步、充电