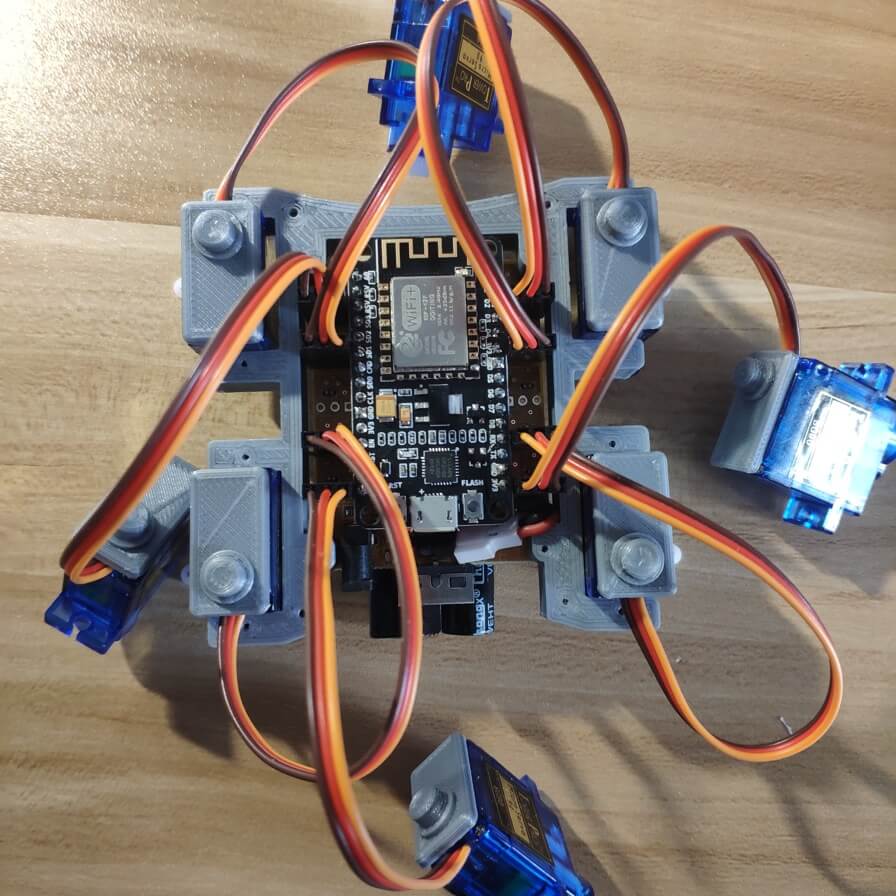
- 如图将剩余舵机插入到主控板的剩余接口上,打开电源开关,此时舵机会复位
必读
- 舵机复位这步必须有,否则会影响后续操作,注意线序,黄色线朝向ESP8266模块
- 执行完复位后,就不要将舵机再拔下来了,直接进行后续安装即可,即便拔下来也要记住刚才复位时哪个电机接的哪个口,装好其余部分后将舵机线插到复位时对应的端口。
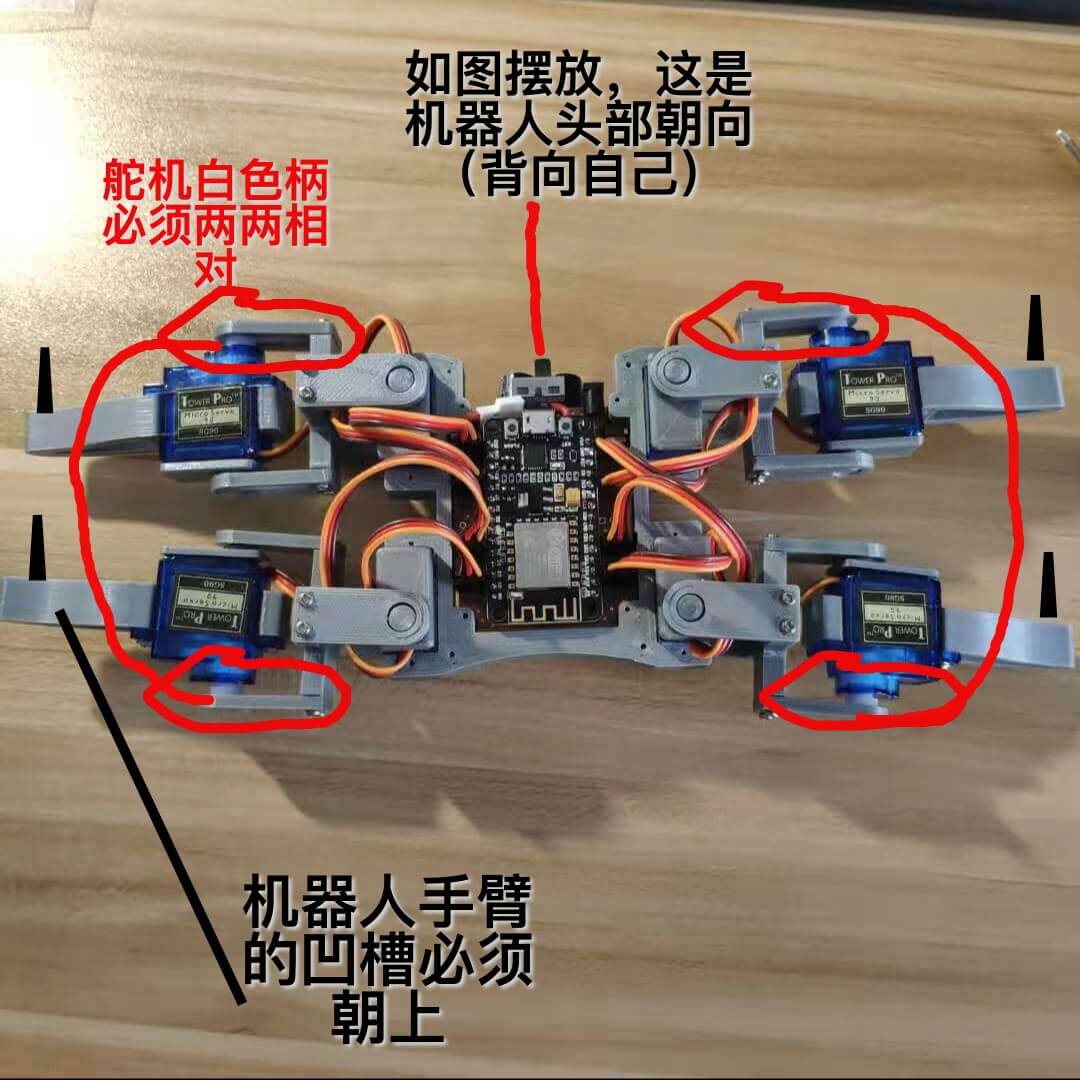
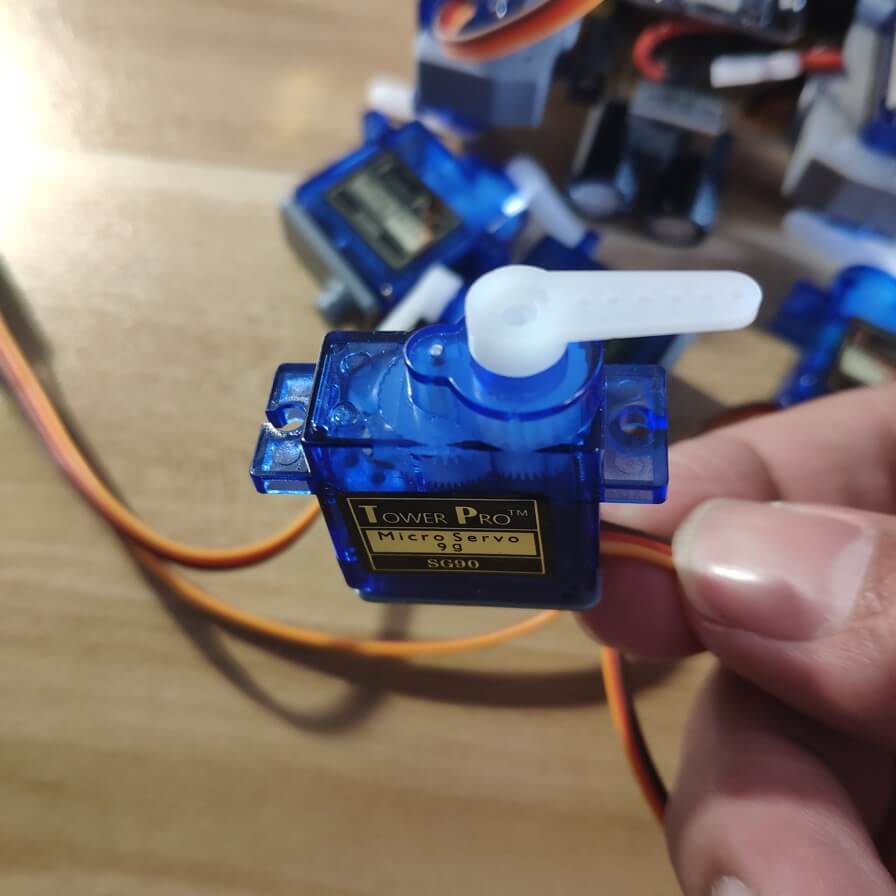
舵机复位后,关闭主控板电源,将舵机如图安装到机器人爪子上,用螺丝拧紧,注意舵机凸出部分的朝向
安装好的示意图,图上是机器人爪子凹面朝上,注意各个舵机的朝向

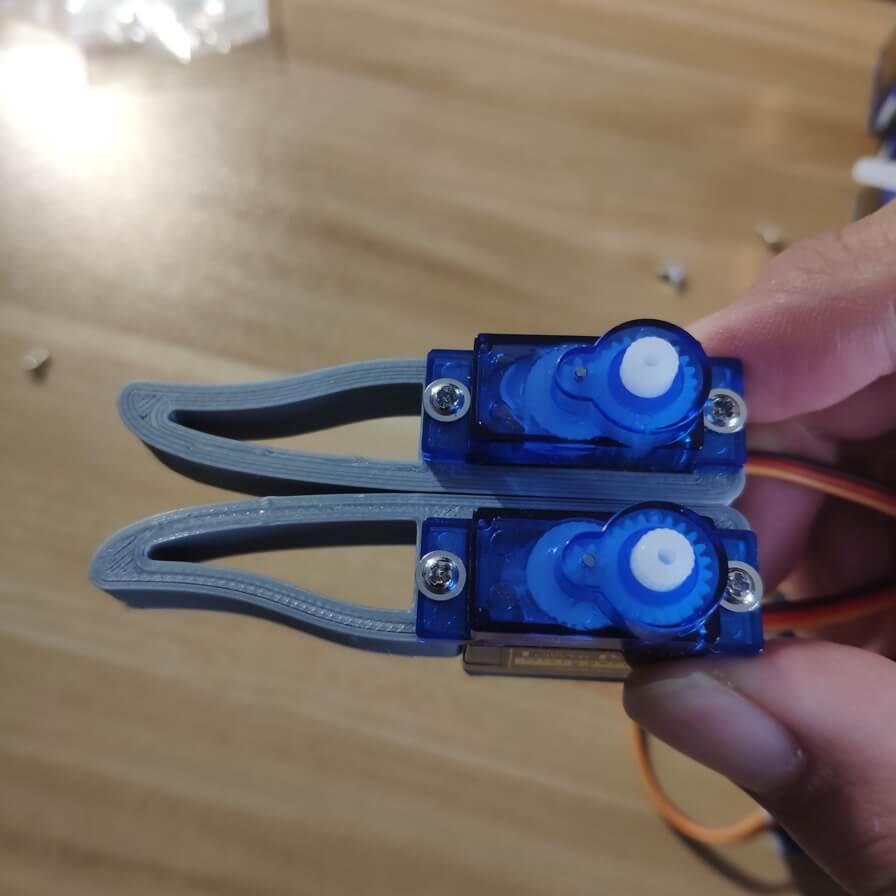
依次安装爪子舵机柄,注意舵机柄和舵机平行,并用螺丝将舵机柄拧紧
安装好舵机柄后,打开电源开关,检测机器臂对应舵机是否复位成功。如果复位成功,机器臂的四个舵机柄和舵机应该是近似平行的,否则要重新安装舵机柄。
- 关闭电源,安装机器人手臂。如图,手臂的凹槽对准舵机柄,先将舵机放入凹槽,然后手臂的关节孔安装到舵机的凸起部位,按照相同的步骤将手臂依次安装好
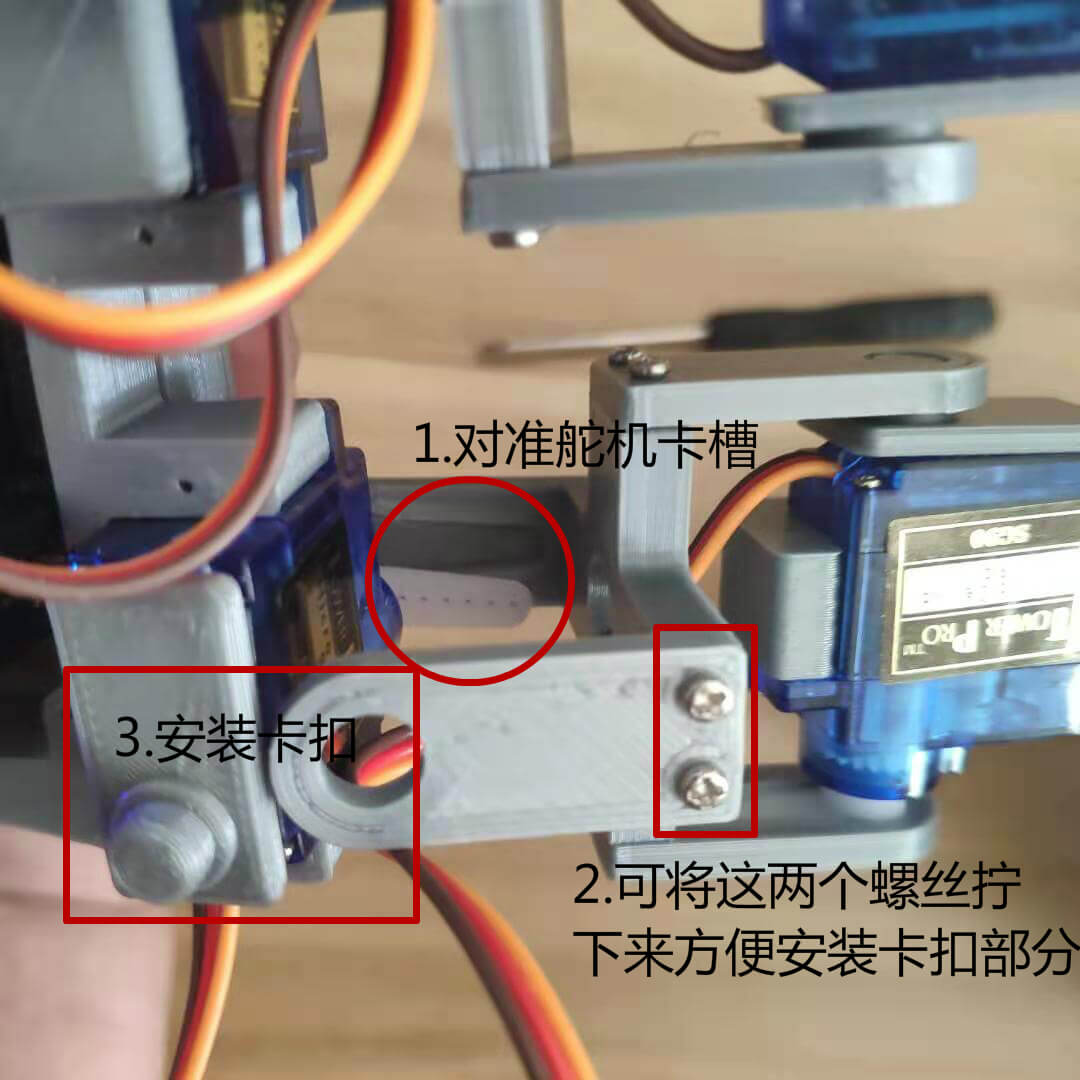
如果步骤 2 的螺丝没有合适的工具拧下来,也可以忽略这步,直接将舵机柄对准机器人的手臂凹槽放入,然后另一端用手轻轻一抬放入安装扣内,也能卡主。注意:用力不要过大,以免掰断。
- 安装好手臂后的示意图,图上爪子的凹面朝上